




















BTN.com staff, December 17, 2015
With each passing day, it seems there?s an announcement of some new application for aerial drones. Major retailers have experimented with using these machines for high-speed delivery. And consumers can readily access a variety of remote-controlled, pilotless aircraft for their own purposes, ranging from land surveying to photographing homes for sale.
None of those drones, however, are quite like the one being created by Francisco Javier Diez and his team at Rutgers University.
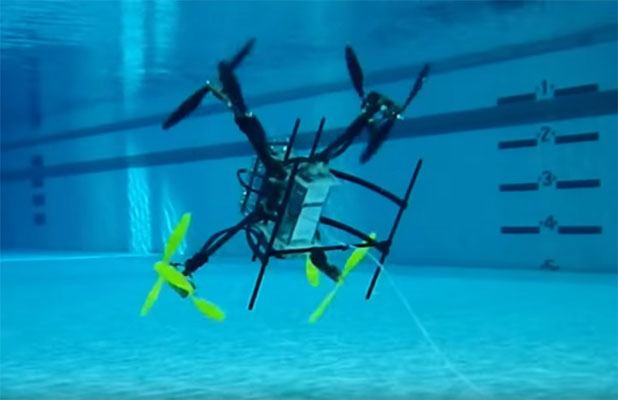
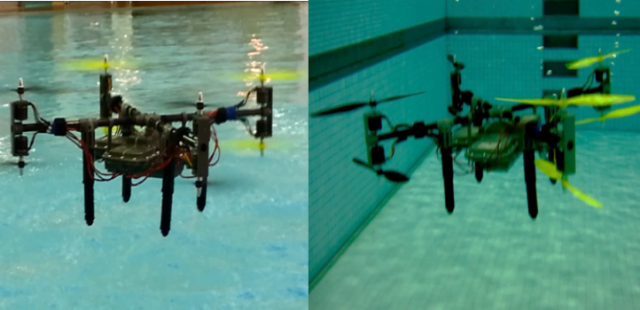
Diez, an associate professor at the school?s Department of Mechanical and Aerospace Engineering, is constructing a drone with unparalleled versatility: It will be able to function underwater as well as in the air.
 Its name? The ?Naviator,? a hybrid of the words Navy and aviator.
Its name? The ?Naviator,? a hybrid of the words Navy and aviator.
The program is funded by the U.S. Navy, which awarded Rutgers a $618,000 grant earlier this year after Diez offered his vision for the new technology, along with a prototype from his previous efforts. It?s an exciting opportunity for Diez, who feels engineers have just begun to scratch the surface when it comes to what drones can do and how they can be used. And it starts by simply letting go of preexisting mentalities.
?We thought things that fly are no good underwater, and things underwater could be no good at flying,? Diez explained. ?We needed to break that barrier. The reason the Navy liked it is because while it very challenging, we are working towards a simple solution that actually works.
?Usually when you are awarded a grant through an agency, there?s a direction you want to go or something you want to build. In our case, we already had a prototype that worked. At the same time, we were confident we could do so much more with it. They liked that and appreciated seeing something that was a little more advanced.?
For Diez and his team of half a dozen graduate and undergraduate students - and more could be added in the near future - the most significant challenge initially is cutting the cord. That?s because currently Diez?s drone is technically more of a manually controlled vehicle with a tether attached in order to communicate and transmit video from underwater.
The most immediate goal is to remove the tether and find a solution in which long-distance communication is possible while the drone is underwater, something that will be addressed through acoustic video streaming.
?We are discussing how to implement acoustics into the Naviator,? Diez explained. ?It?s a challenge to send video via acoustics. When you are underwater, it?s very low bandwidth, and it?s hard to send much of anything. So wouldn?t it be great if we had a vehicle that could send video from underwater? We want to come up with a solution to have live-feed video transmitted when the source is 20 miles away underwater.?
The possibilities for how this drone can be used are endless. Mine-detection is an ongoing challenge for the Navy. Recently, the Pentagon?s weapon-testing office revealed that its Remote Minehunting System, developed for the Navy?s new littoral [i.e., coastal waters] combat ship, wasn?t completing its most basic functions despite nearly $700 million in funding and 16 years of development.
While Diez?s project is different in several senses, the Naviator could help with some tasks in mine searching and detection.
?Imagine that you are on a ship and you receive a warning from one of the underwater vehicles that there is an area which requires investigating,? Diez said. ?This drone, within minutes, will be able to figure out what it is. Currently, it takes much longer. They may have to use helicopters and divers.?
Other potential applications for the drone could include monitoring oil spills and search-and-rescue missions. In fact, a highly regarded search-and-rescue group from Germany recently contacted Diez to express its interest in the technology.
Much further down the road, Diez envisions a drone that will be capable of making decisions on its own.
[btn-post-package]?These machines will make decisions that will help us,? he said. ?If you send a vehicle on a mission, it needs to be aware of its surroundings. It needs to communicate with other vehicles. If there is an obstacle in its path, the vehicle needs to be able to make a decision about what to do.
?Smart vehicles are the way of the future, but right now, they need to have an operator. A vehicle that is capable of making those decisions without an operator requires an increase in its intelligence and the ability to react to its environment. That would be huge, and I think we are 10 years or more before that happens. But these are very cool times.?
By Adam Fluck